Jan 04, 2011 - New Hardware
My server was down over break, and I was busy actually working on the robot, so I didn't have a lot of time to write up what I doing. I'll try to summarize it as best I can, but this is going to be a long post.
Since last we spoke, I decided to redo all of the power control hardware on the robot, including the voltage regulators and motor controller. There are two advantages to this; first, I get back the space on the back the robot where the motor controller was, so that the mountings for the new motherboard and the laser scanner don't have to be crammed to the front of the robot, and second, it replaces the old motor controller, which required a lot of special-case code to handle reversing an braking.
Construction photos and new hardware:

New power switches mounted to the robot. They face downward so that I can reach them when the case is on the robot.
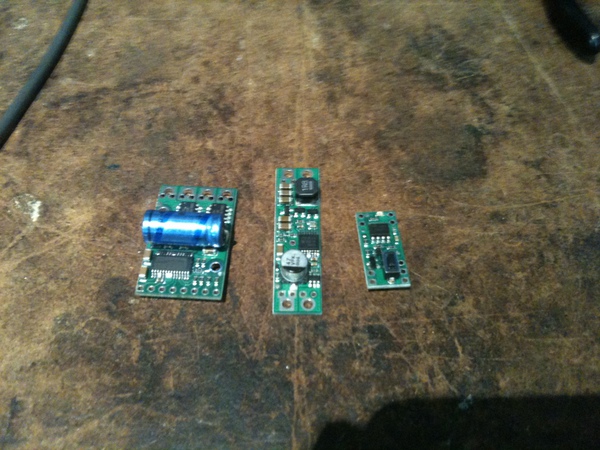
The new power control boards for the robot, from left to right:
The first two are pretty self-explanatory; the pushbutton power switch allows the robot to turn itself completely off when the batteries get too low, to avoid over-discharing the batteries.
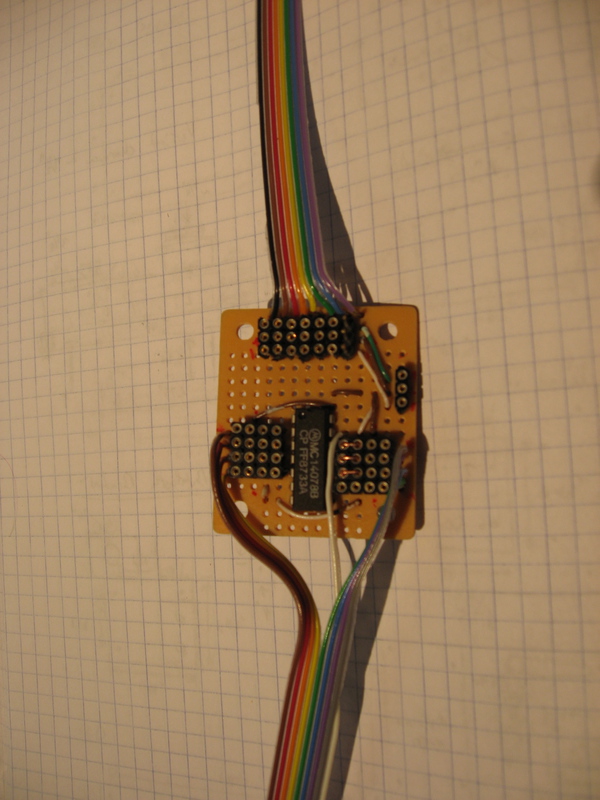
The new sonar control board. I bought the logic gate I actually need for this, and condensed all of the electronics that were on the breadboard onto a single board.
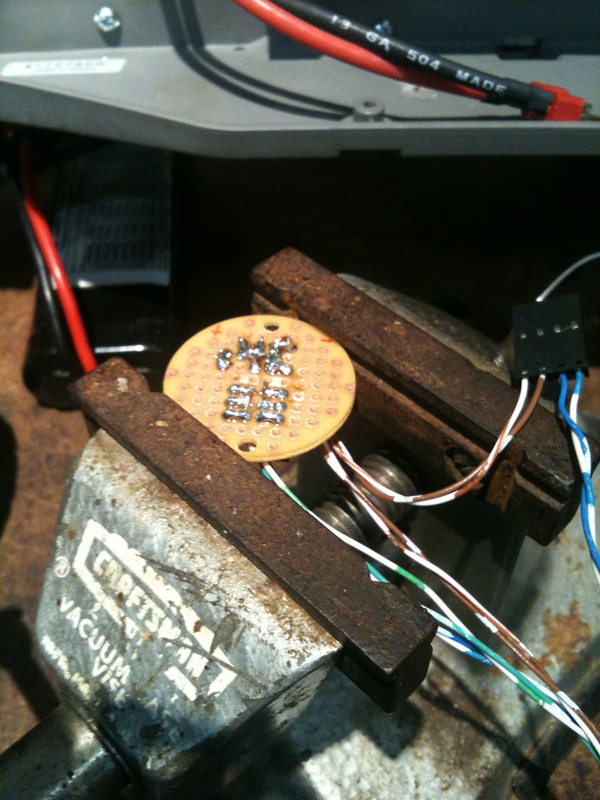
Soldering the bottom of the compass and top power distribution board.

The guts of the robot, open so that I could re-solder the wires going to the motor controller. This gives a general idea of the structure of the new brackets, the layout inside the center channel, and how everything goes together.
Blanks that will become the new rear sonar brackets.

Drilling the holes in the new sonar brackets. At 11/16, that's a big drill bit.
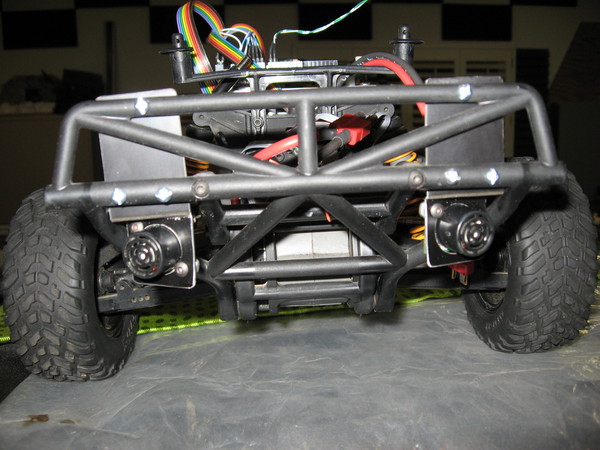
The rear sonar brackets, finished and installed. They're a lot better than the old ones.

The finished robot, assembled and ready to be programmed!
Home